
PXFmini是由Erle Robotics开发的紧凑型自动驾驶控制器,专为树莓派设计。它提供了广泛的传感器接口和I/O端口,以及集成的飞行控制软件。 主要特性: 飞行控制器:PXFmini集成了Pi…
This is a node.js based server for companion computers used in Mavlink-based vehicles (ie Ardupilot,…
PX4 support for this flight controller is experimental. The PilotPi shield is a fully functional sol…
M9N是一款GPS模块,由u-blox公司生产。它是u-blox公司推出的高性能GPS接收器之一,用于全球定位系统(GPS)和其他卫星导航系统的接收和定位。 M9N模块采用了u-blox最新的GNSS…
开源的无人机数据链路项目: MAVLink: MAVLink是一种轻量级、无人机通信协议,广泛应用于无人机系统中。它提供了一套消息格式和通信规范,用于在飞行控制器、地面站和其他无人机组件之间进行数据交…
Pin 1 starts from the flight controllers “right side” like diagram below Power1 & …
F9P是u-blox公司推出的一款高精度GNSS(全球导航卫星系统)模块。它基于多种卫星导航系统(包括GPS、GLONASS、Galileo和BeiDou)和多频段技术,提供了精确的位置、速度和时间信…
OpenBrushless: OpenBrushless是一个开源的无刷电机控制器项目,可用于构建自己的云台系统。它支持多种传感器和控制算法,具有稳定的性能和灵活的配置选项。 SimpleBGC: S…
光电吊舱(Electro-Optical Payload)是一种航空器或无人机上搭载的光电传感器系统。光电吊舱通常由多种传感器和设备组成,用于从空中获取高分辨率图像、视频和其他感知数据。 光电吊舱的主…
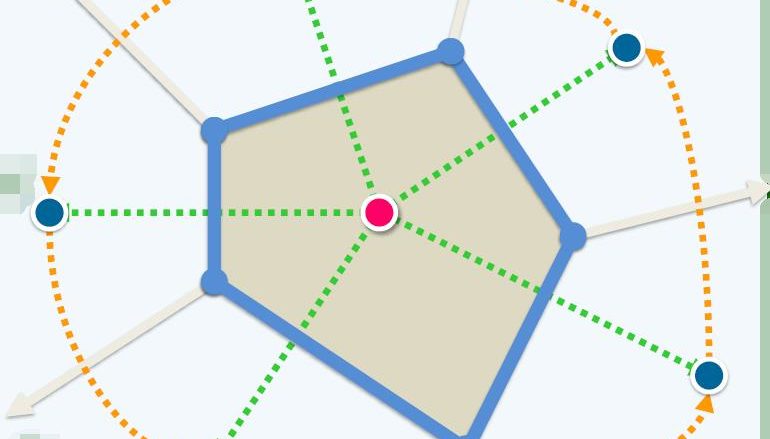
matlab 维诺图质心算法。 function [centroids, clusters] = voronoi_centroid(points) %VORONOI_CENTROID Vornoi d…