
Background/History of the Product:
4 years after the original Pixracer was designed and proven, we recognized the need to bring the design to the forefront of open-source flight controllers. With the Pixracer Pro, we maintained everything that the community loved about the original Pixracer (R15) and improved every deficiency that was known. The resulting fight controller is destined to become the new go-to flight controller for developers and a rock solid foundation for commercial and industrial systems.
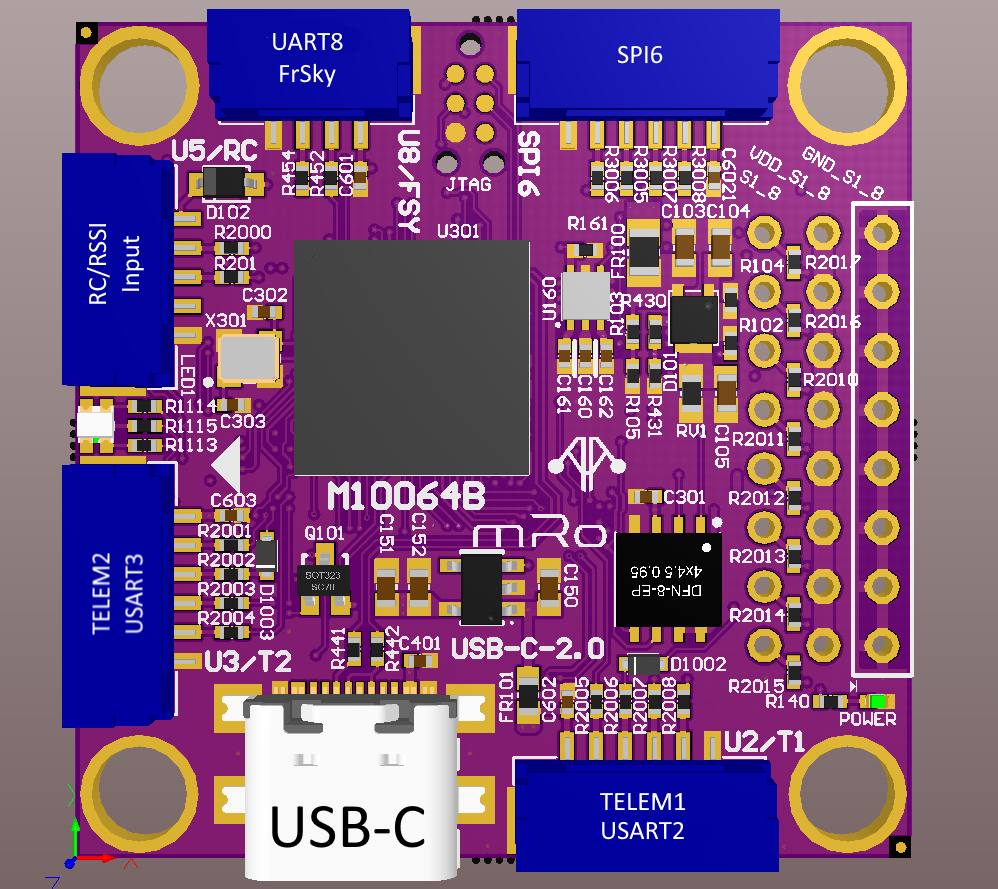
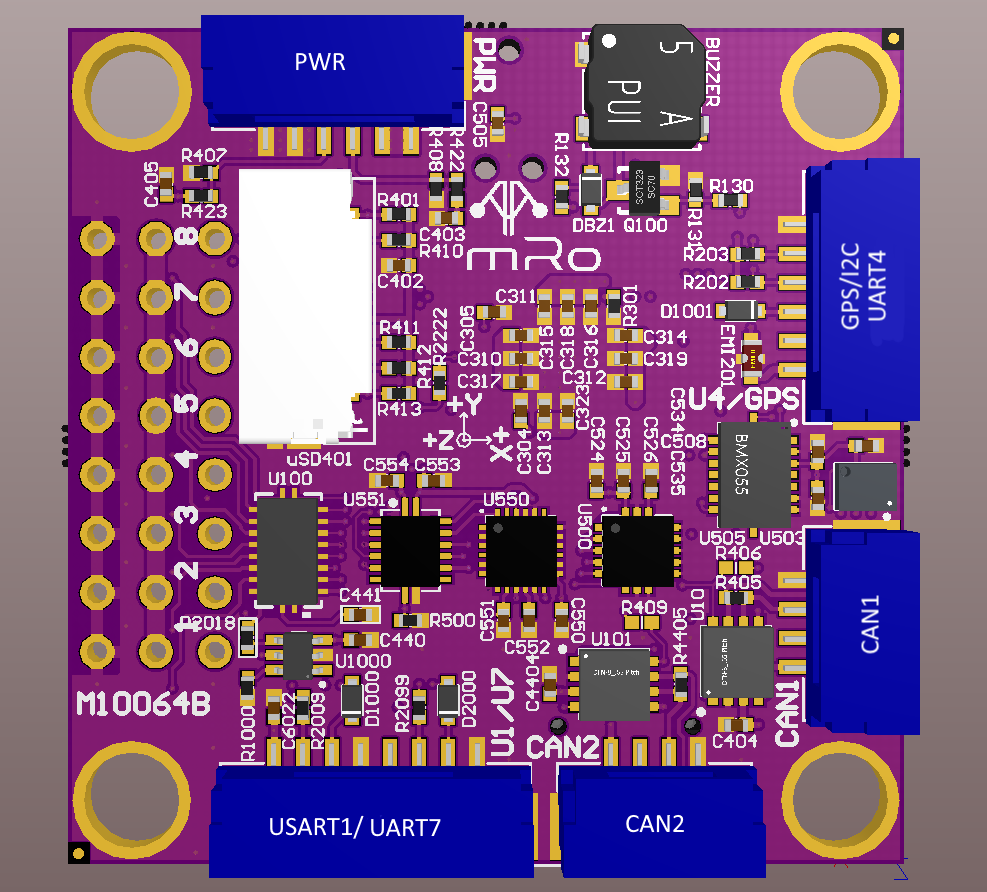
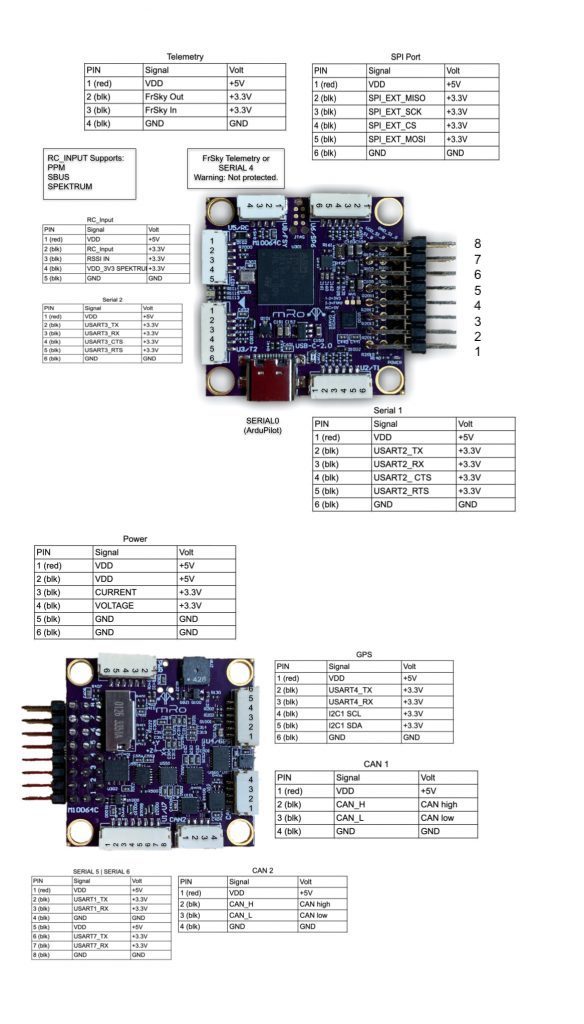
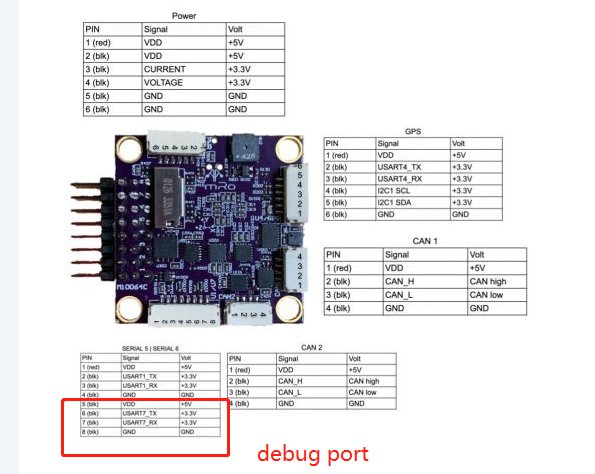
Pinout
Specifications
| Specifications | mRo Pixracer Pro |
| Main Processor | 32-bit STM32H743 Cortex M7 RISC core with FPU 460 MHz |
| IO Processor | No |
| RAM | 1024 KB RAM |
| Flash | 2 MB FRAM |
| Crypto / Hash Processor | No |
| Accelerometers / Gyros / Mags | Accelerometers / Gyros / Mags |
| Sensors – Dampened | Bosch BMI085 (6DOF) (internally vibration dampened) |
| Sensors | Invensense/TDK ICM-20602 (6DOF) Invensense/TDK ICM-20948 (9DOF) |
| Internal Magnetometer | AK09916 inside ICM-20948 |
| Barometer | Infineon DPS310 barometer (Very smooth and NO light sensitivity) |
| Interfaces and Protocols | 6x UART (serial ports) [2x with HW flow control,1x FRSky Telemetry (D or X types), 2x General Purpose & 1x GPS+I2C].
1x PPM sum input signal Supported RC input protocols: |
| Connectors | – JST-GH – USB-C |
| Pin Headers | Yes – 8 Servo |
| Conformal Coating | No |
| Extended Testing and Burn In | No |
| Custom Carrier Board Support | No |
| LED | Yes (RGB) |
| Dimensions | Width: 36mm (1.42”) Length: 36mm (1.42”) |
| Weight | 9.09g (.31 oz) |
| Mounting Holes | 4mm holes at 31.5mm spacing, Silicone grommets for m3 screws |
| Protector Case | Optional |
| Typical Platforms | -Multirotor -Rover -Fixed-Wing -Boats -Submarines -VTOL -Automatic Tractors -Others |
| Compatibility | PX4 >1.13.0, Ardupilot |
Firmware
The mRo Pixracer Pro is compatible with the following firmware:
ArduPilot
-ArduCopter 4.x
-ArduPlane 4.x
-ArduRover 4.x
PX4
-PX4 greater than v1.13.0 (master or beta only until v1.13.1 release)
Normal Usage Guide
-> BATT_VOLT_PIN= 14
-> BATT_CURR_PIN= 15
All connectors follow the Dronecode connector standard. All connectors are JST-GH.
Pixracer Pro do not have a safety switch option, If there’s a need to have one a CAN switch is required.
What’s included
- 1x SD Card
- 1x Right angle 3×8 0.1″ header pin
- 1x Connector GH Housing 8 position 1.25 mm
- 2x Connector GH Housing 6 position 1.25 mm
- 4x Rubber Balls (Dampers)
- 1x Heatsink
- 2x MRC0206 mRo 6-Pins JST-GH to 6-Pins JST-GH
- 1x MRC0202 mRo 6-Pins JST-GH to 6 Separate 2.54mm Females
- 1x MRC0204 mRo 5-Pins JST-GH to 3-Pins Servo and 3-Pins JST-ZHR and 1-Pin (2.54mm) Female
- 1x MRC0205 mRo 4-Pins JST-GH to 4-Pins JST-GH
- 1x MRC0287 mRo 8-Pin JST-GH to 8PCS Dupont 1Pin Connector
- 1x MRC0288 mRo 8-Pin JST-GH to 2PCS JST-GH 4Pin Connector
Extra Features
Pixracer Pro has a built-in buzzer.
Downloads
Dshot capability
All motor/servo outputs are Dshot and PWM capable. However, mixing Dshot and normal PWM operation for outputs is restricted into groups, ie. enabling Dshot for an output in a group requires that ALL outputs in that group be configured and used as Dshot, rather than PWM outputs. The output groups that must be the same (PWM rate or Dshot, when configured as a normal servo/motor output) are: 1/2/3/4, 5/6, and 7/8.



